
Haptic Shared Control
Numerous companies and academic groups are pushing to develop autonomous vehicles with the aim of freeing up attention for drivers and improving safety on the road. However, barriers remain for deployment of fully autonomous vehicles, including technical, legal, and social barriers. Combining the best capacities of a human driver with the speed, accuracy, and tirelessness of automation will require an interface that is intuitive for the driver. In this project, we are developing an interface based on haptic shared control, wherein the human driver and automation system communicate and negotiate authority over the steering angle by modulating not only imposed torque, but also their respective mechanical impedance. (by: Akshay Bhardwaj)

Shared Control in Vehicle Steering Across Routine and Off-Nominal Conditions
Experience with increasingly autonomous systems in aviation and other complex domains has shown that performance breakdowns tend to occur at transition points and in off-nominal conditions, rather than during routine operations. In particular, operators experience ‘automation surprises’ during transitions between levels of automation, in cases where the system acts in unanticipated or unexplained ways, and when it transfers control to the operator without adequate advance warning. Further, a lack of transparency regarding the capabilities, limitations, and strategies of highly automated systems has been associated with trust miscalibration and the failure to intervene when necessary. Keeping operators involved, informed, and engaged on a continuing basis has proven critical for handling unexpected events and preventing such events from turning into accidents. This project focuses on understanding the authority transitions between human drivers and vehicle automation systems by comparing driving performance under discrete and continuous control sharing schemes and under normal (intended) and faulty (adversarial) automation behaviors. (by: Akshay Bhardwaj)
The Holy Braille Project
Digital Hydraulic Body-Powered Exoskeletons for Stroke Rehabilitation
Traditional exoskeletons employ highly-geared motors to provide enough power to move or constrain the human body. This leads to a heavy, non-backdrivable exoskeleton with limited portability. We are developing an alternative style of exoskeleton, in which power can be routed from one limb to another for assistance and rehabilitation via a digital hydraulic transmission. By linking the joints together through a variable transmission, we will be able to coordinate and constrain relative motions between the user’s joints. Using digital hydraulics, we will connect different cylinders through a valve bank, altering the transmission ratio to relate the user’s input motions to desired output motions. Since the user’s own body power is employed to move another limb, the device is inherently safe and backdrivable. (by: Emma Treadway)

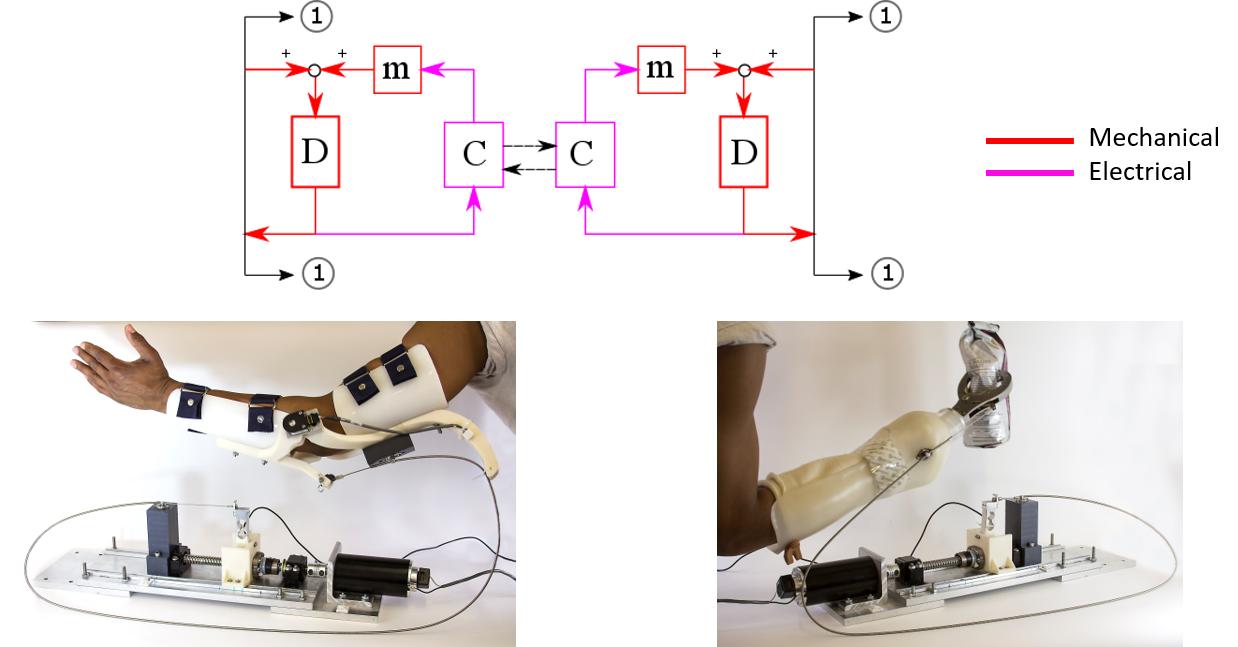
Sensory Feedback for Neuroprosthetic Devices
This research project seeks to develop and validate novel forms of sensory feedback, in particular haptic feedback, that enhance the interface between living and engineered systems for neuro-prosthetic applications. We propose to provoke an association in the brain that relates information detected using electromechanical sensors imbedded in the prosthesis to information presented to the body. The objective is to achieve a highly dexterous human-machine interface. We have developed a custom-built prosthetic device for upper-arm amputees and whole-bodied individuals. The device is controlled through electromyography (EMG) or position control, and provides enhanced sensory feedback. (by:Jeremy Brown)
Eddy Current Motor Design and Performance Analysis
The eddy current motor project is aimed at developing a new class of motor that would better serve certain application needs in robotics (in particular haptic devices, or robots that interact with human users) than existing electromagnetic motors. The use of eddy currents has the potential to generate high torques on a rotor even when that rotor has an exceptionally small inertia. DC motors can’t do that. Low inertia is of particular interest in robots that interact with humans so that they are both safe and capable of simulating “free space”. Free space (what you feel when you wave your hands in thin air) has essentially zero inertia. Haptic devices equipped with traditional DC motors always have non-inconsiderable inertia, which is lacking in simulation free space. Haptic device is motorized (robotic) device meant to be grasped by a human user to allow them to manipulate virtual objects. High-fidelity feel of free space is always difficult to produce because of the significant inertia associated with traditional motors. (by: Xinyi Ge)
Piano Gauge
Friction and balance weights are important properties of a piano key for piano manufacturers. Piano technicians try to obtain constant friction and balance weights to ensure a consistent feeling from key to key. To do this, they can spend up to 15 hours to measure and adjust the entire 88 keys for a piano. This an inconsistent, time-consuming process with poor repeatability, because several steps in the testing procedure are subjective and might vary between the technicians whom perform them. For example, technicians subjectively observe a ”smooth” motion. Moreover, tapping the piano frame also brings random factors.
We designed and built a linear flat voice coil motor with no bearings which has a programmable force output. The feature of applying no bearings ensures that no extra friction is involved in the piano keys’ measurement, and thus provides high accuracy. The entire apparatus is composed of three main parts: the linear motor, the base, and the control system. The base can be replaced with any other static mechanisms to fit the demand of use in different situations. (by: Baoyan (Colin) Jian)
Haptic Interface Design for Piano Action
The objective of this project is to realize the real-time haptic rendering of piano action through a motorized synthesizer keyboard. We propose to construct a piano action model by adopting an empirical technique, specifically, a frequency-domain system-identification method. We fit a family of linear parametric models based on contact conditions of piano parts. We then assemble them computationally into a hybrid dynamical model. Motorized electronic keyboards will be designed to realize the real-time simulations of the hybrid dynamical model. (by: Bo Yu)
Investigating Fundamental Limitations for Cooperative Multi-Agent Systems
Agents interconnected through virtual links are capable of displaying a larger and more interesting set of behaviors than agents interconnected through physical links. String instability is one example of a behavior that emerges from a multi-agent system (e.g. a platoon of autonomous vehicles) with virtual links. Only very recently have such statements been proved for agents using arbitrary control policies through analysis from the theory of fundamental design limitations. Significant gaps remain in the determination of fundamental design limits for cyber-physical systems. The goal of this project is to develop and extend design limitations theory to cover systems with oscillatory dynamics whose architectures feature both virtual and physical links and both computer and human control. In particular, we are interested in how the oscillator dynamics, communication topology, and human-controlled agents affect the string stability of the whole system. We believe such an analysis of fundamental limitations can illuminate the causes and possible remedies for string instability. (by: Bo Yu)
Haptic Rendering of Hybrid Dynamical Systems
Extremal Distance Tracking
Parameter Estimation for Hybrid Dynamical Systems
On-line Symbolic Constraint Embedding
Fundamental Limitations of Tele-operation Performance
Haptic Interface for Vehicle Control
Shared Control of Vehicle Steering
Automotive Steer-by-wire Systems
Vibration Feed-through Cancellation
Human Motor Adaptation and Rehabilitation
Adaptation to Task Parameters in Object Manipulation
Power and Information Transfer with Haptic Feedback
Self-Assistance for Spinal Cord Injury Rehabilitation and Training
Upper-Extremity Stroke Rehabilitation
Upper Limb Tele-Rehabilitation
Sequence Learning